(تصویر) هواپیماهای بدون سرنشین آبی بهتر از ماهی شنا می کنند
۱۴۰۴-۰۱-۱۵
6059
اثر انگشت اتوماتیک تن ، آب ، بازیابی ، استفاده از آب را کنترل می کند و کشتی های نامزد شده را تا 5 ٪ در مقایسه با باله های سنتی افزایش می دهد.
به گفته ایسنا ، گروهی در دانشگاه مریلند با توسعه یک رقص ربات با نام Tuna ، فناوری هواپیماهای بدون سرنشین زیر آب را بهبود بخشید.
این پروژه با هدف افزایش سرعت و توانایی مانور و به دنبال پر کردن شکاف عملکرد بین ترکیبات زیر دریایی بدون سرنشین و فضای هوایی آنها است. هواپیماهای بدون سرنشین مجهز می توانند اکتشافات دریایی عمیق را تبدیل کرده و عملکرد بهتری نسبت به طرح های فعلی ارائه دهند.
هرتاس سردیرا ، استادیار مهندسی مکانیک در دانشگاه مریلند گفت: “من از شناگران بیولوژیکی الهام گرفته ام که بیش از میلیون ها سال تکامل یافته اند و می توانند با نخ باله کارآمدتر شوند.” وی گفت: “ما نمی توانیم ماهی درست کنیم.” اما ما می توانیم یک روبات درست کنیم که ماهی را حرکت و بهبود می بخشد.
الهام از لحن ماهی
کشتی های از راه دور پیشرفته به پروانه های پیچ بستگی دارند. با این حال ، با روبات ها و استقلال ، وظایف این کشتی ها پیچیده تر می شوند و به عملکرد و مانور بیشتری نیاز دارند. دانشمندان به نیروی محرکه الهام گرفته از موجودات بیولوژیکی متوسل می شوند زیرا شناگران بیولوژیکی در استانداردهای اصلی عملکرد بهتری نسبت به سیستم های انسانی دارند.
علی رغم مزایای آن ، هر دو سیستم پرداخت بیولوژیکی و مکانیکی با تبادل بین عملکرد و مانور روبرو هستند. به عنوان مثال ، کشتی هایی که زیرساخت های نفتی زیر آب را بررسی و ترمیم می کنند ، باید ضمن حفظ مکان دقیق آنها ، مسافت های طولانی را پوشش دهند. سیستم های مانور فعلی ، از جمله سطوح بلند کردن ، وکتور پرداخت و موتورهای جانبی ، هر کدام دارای نقص هایی مانند افزایش انبساط ، پیچیدگی یا زمان پاسخ آهسته هستند.
این مطالعه جدید با ادغام مفاهیم مهندسی و طبیعت ، رویکرد جدیدی را برای تأمین انرژی از شناگران ارائه می دهد. مطالعه حاضر یک سیستم رانش زیر آب جدید را ارائه می دهد که باله باله پارکینگ ، به ویژه ماهی را مخلوط می کند.
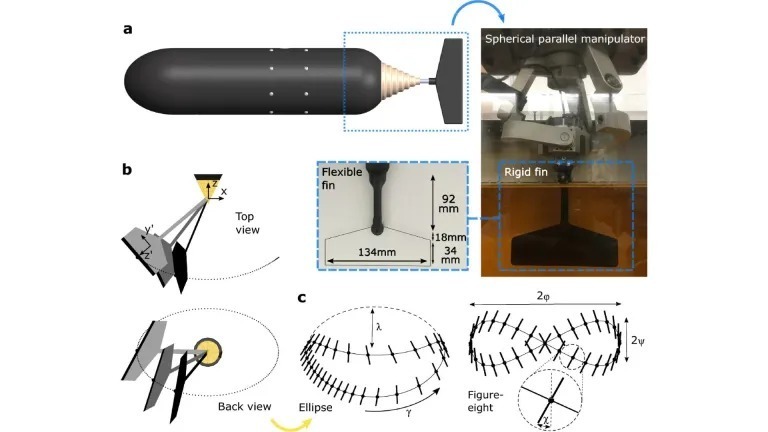
هواپیماهای دریایی حاوی یک سیستم روباتیک است که دم را قادر می سازد تا از سه جهت آزادانه حرکت کند. با توجه به انعطاف پذیری ، این سیستم می تواند در طیف وسیع تری از طرح های ملخ طبیعی یا مدرن حرکت کند. با این حال ، ممکن است تعیین چگونگی حرکت باله برای فعالیت های خاص دشوار باشد.
برای حل این مشکل ، محققان از روشی استفاده می کنند که به داده هایی متکی است که به تجربیات دنیای واقعی بستگی دارد. آنها با آزمایش حرکات مختلف و تجزیه و تحلیل نتایج در حال حاضر ، آنها مؤثرترین حرکات باله را برای هدایت هواپیماهای بدون سرنشین دریایی تعیین می کنند. هدف از این رویکرد ایجاد یک وسیله نقلیه بسیار مؤثر و خاصیت ارتجاعی زیر آب است.
اگرچه این سیستم پیچیده تر و گران تر است ، اما می توان آن را به گونه ای تنظیم کرد که باله های آینده مانند باله های انعطاف پذیر را افزایش می دهد که باعث افزایش کارایی می شود.
محققان قصد دارند تا پایان سال باله بسازند و آن را در یک تونل آبی در آزمایشگاه آب مریلند آزمایش کنند. پس از اتمام هواپیماهای بدون سرنشین ، طی دو تا سه سال ، آزمایشات در آزمایشگاه نوآوری فناوری مریلند در مریلند جنوبی انجام می شود.




